项目开源
整套系统
1.认识WAYMORE
WAYMORE是HIDCL实验室推出的开源类人协作机器人平台,由气动人工肌肉驱动,采用符合人体解剖学的结构设计,具有柔顺、灵活、安全等优点,是一种理想的医疗服务机器人解决方案与算法验证平台。
WAYMORE具备“结构类人”和“思维类人”两大特点。“结构类人”体现在执行单元、连结单元和控制单元:系统基于骨骼肌肉的机器人模型,采用McKibben多丝肌肉束、柔性灵巧手和医学骨骼模型搭建。“思维类人”体现在感知与决策的能力:系统通过传感器数据对环境进行识别与理解,并在此基础上做出决策,进行动作规划与路径规划。

2.基于平台的研究
HIDCL实验室围绕WAYMORE的两大特点(“结构类人”与“思维类人”)开展了机械设计、感知理解和决策控制等方向的一系列研究与探索,包括:类人交互机械臂平台本体设计、基于强化学习的类人机械臂控制、环境感知与人体行为意图理解,以及类人交互机械臂应用探索。
(1)类人交互机械臂平台
机器人本体采用仿人的骨骼肌肉模型,等比例真实还原人体的各个躯干、关节以及主要的肌肉;使得该机器人本体具备和人类相等的运动自由度,能够灵活完成各种类人动作。
气动肌肉采用多丝 McKibben 肌肉,可以灵活 模拟不同尺寸和形状的肌肉,0.5Mpa 气压可以实现最大35%的收缩率。
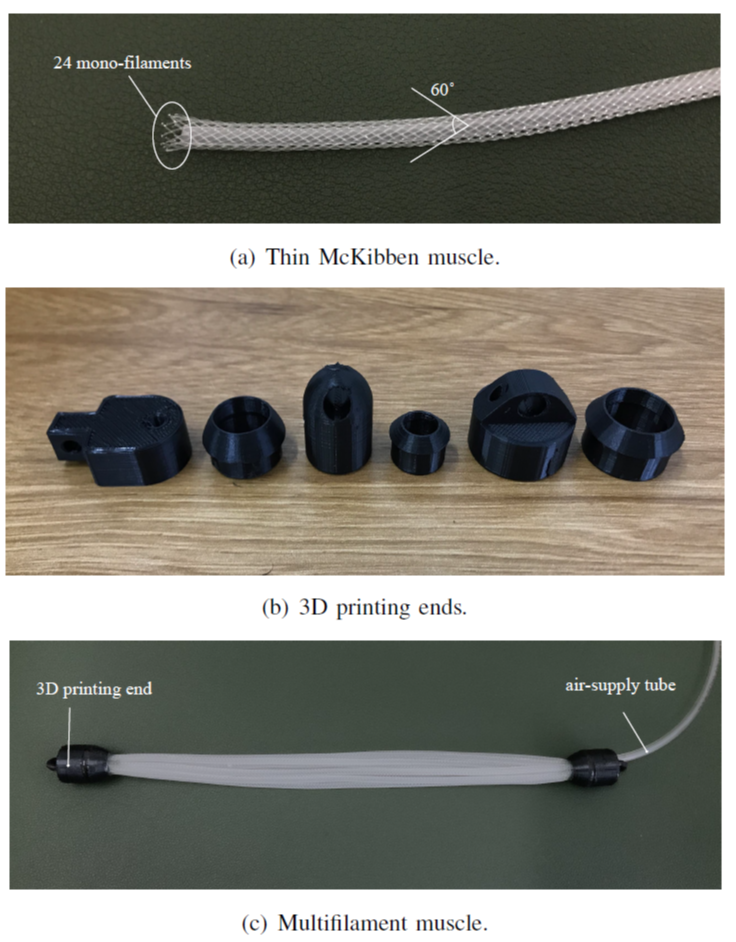
控制系统由压力罐、稳压阀、电磁阀、压力传感器、微型控制器等组成,可以快速响应控制指令完成气动肌肉的充气、保持以及排气过程。另外控制系统可以快速精准完成气压闭环控制,最大控制频率为10HZ,控制精度在0.1kpa,最大充气速度为10Mpa/s ,最大排气速度为20Mpa/s。
(2)基于强化学习的类人机械臂控制
在仿真环境使用强化学习方法对不同肌肉配置的机器人手臂进行了控制,通过找到运动范围最大的肌肉组合确定最优肌肉配置。
基于深度相机的位置跟踪闭环控制
(3)环境感知与人体行为意图理解
A. 基于表面肌电信号的抓取力预测&柔性、易碎物体的抓取控制
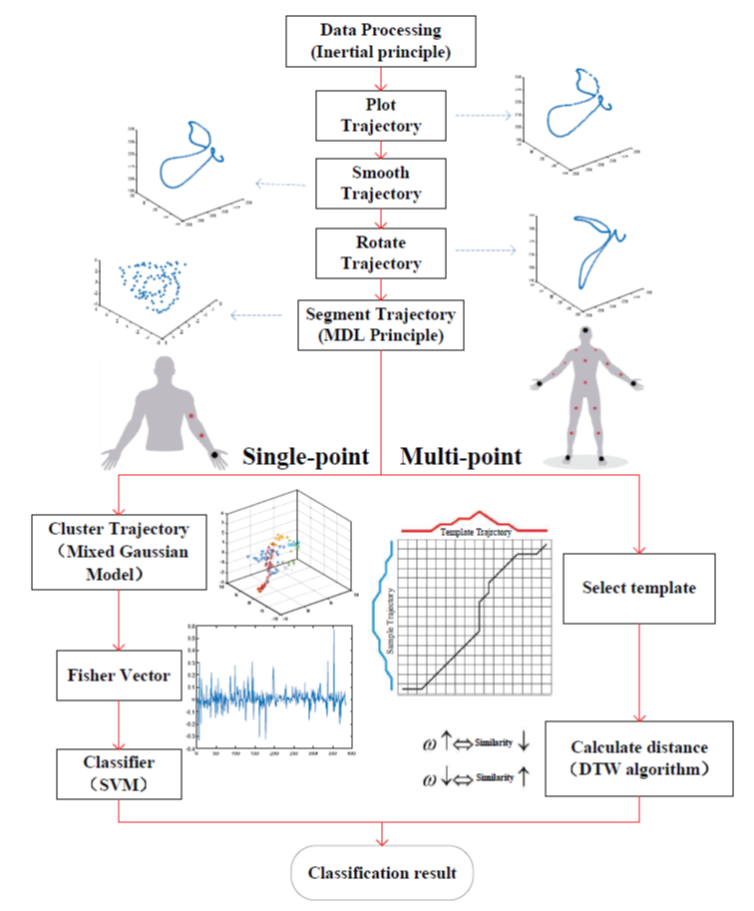
B. 利用人体关节点轨迹特征对人体动作进行识别的算法
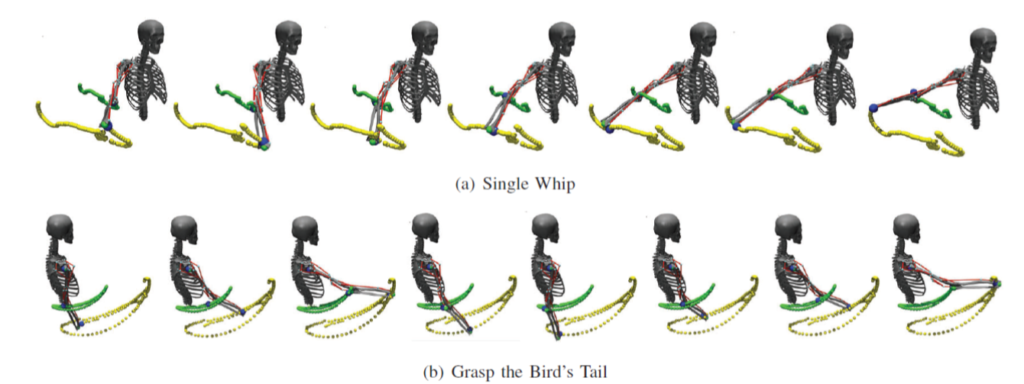
C. 机械臂平台的类人控制研究,用强化学习算法训练骨骼肌肉机械臂打太极拳
(4)类人交互机械臂应用探索
A. 基于气动柔性仿生手和动作检测设备的手语交互系统
手语是自然语言的一种,具有自身的词汇、语法,且具备任何语言系统的所有特征。而 人类的手有23个自由度,具有极高的复杂度和灵活性。我们基于气动的柔性仿生手和动作检测设备,对手语交互进行研究。
B. 帕金森病辅助康复设备
帕金森病辅助康复设备旨在缓解帕金森病人的静止性震颤,由气动肌肉,惯性传感器,嵌入式处理器,便携式气泵与护臂主体组成。气动肌肉放置于护臂夹层之中,当传感器检测到病症出现,会通过处理器进行数据运算从而控制肌肉充放气来形成对震颤的抑制作用。在检测到患者的主动运动倾向时,会调整对应的气动肌肉从而减小对正常运动的阻滞效果。发病响应速度在 1s 左右,将患者 0~5Hz 内的颤动幅度降低 90% 以上,从而在帕金森病人的日常生活与病情康复中发挥有益作用。


C. 基于柔性灵巧手的手部肌肉康复设备
该手部肌肉康复设备对有手部肌肉僵硬的患者提供外部力量进行辅助运动。柔性手由3D 柔性打印材料整体打印而成,结构设计上类似人手,通过气动实现对柔性手姿态的控制,柔性手由 9~18个气动软驱动器组成手指之间的软致动器用于外展和内收运动 -气压控制系统通过对每个气动驱动器的气压控制实现手掌不同姿势